Liy anbalaj ka kowòdone otomatik





Ka kowòdone otomatikliy anbalaj,
liy anbalaj,
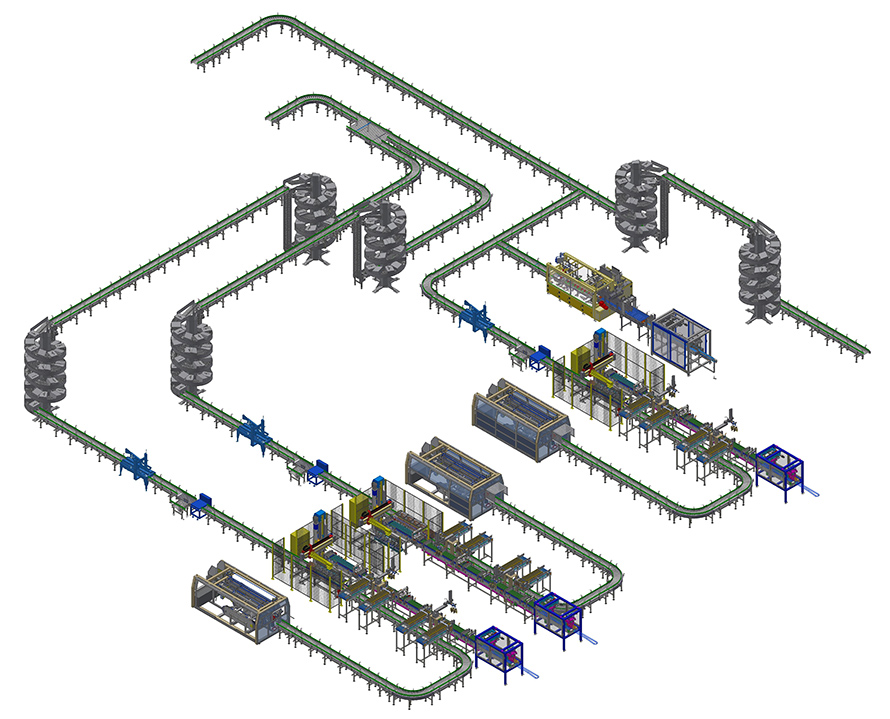
Liy pwodiksyon anbalaj la gen ladan l yon divizè rapid, yon liy transpò pwodwi, yon liy transpò pou pran pwodwi, yon Hbot, yon mekanis pou deplase ak doub aks, yon liy transpò bwat, yon mekanis deteksyon, yon priz pou patisyon katon, yon sistèm pou bay patisyon katon, yon kowòdone servo, yon priz pou boutèy, ak yon kloti pwoteksyon. Divizè rapid la divize pwodwi yo an plizyè liy, pandan mekanis pou deplase ak doub aks la akselere pasaj pwodwi yo. Apre pwodwi a rive nan estasyon patisyon katon an, robo Scar la chaje patisyon katon an nan pwodwi ki ranje yo. Pwodwi yo rive nan transporteur klasman an. Apre sa, priz la ranmase pwodwi yo epi mete yo nan bwat katon an, epi transporteur bwat la transpòte bwat ki gen pwodwi a deyò.
Plan konplè sistèm anbalaj la
Konfigirasyon prensipal la
| Bra robo | ABB/KUKA/Fanuc |
| Motè | SEW/Nòd/ABB |
| Motè sèrvo | Siemens/Panasonic |
| VFD | Danfoss |
| Capteur fotoelektrik | MALAD |
| Ekran taktil | Siemens |
| Aparèy ki ba vòltaj | Schneider |
| Tèminal | Phoenix |
| Pneumatik | FESTO/SMC |
| Disk aspire | PIAB |
| Kote yo pote | KF/NSK |
| Ponp vakyòm | PIAB |
| PLC | Siemens /Schneider |
| IHM | Siemens /Schneider |
| Plak chèn/chèn | Intralox/rexnord/Regina |
Deskripsyon estrikti prensipal la




Plis emisyon videyo
- Anbalè bwat kowòdone servo pou boutèy an vè ak patisyon katon
Kijan machin anbalaj la fonksyone? Pwodwi yo pase nan yon seri pwosesis otomatik
ak etap ki byen òganize, ki gen ladan tri nan liy pwodiksyon transpò a, vire pou tri, yon tanpon akselere, yon machin anbalaj, yon mekanis sele otomatik, epi finalman pwodiksyon pa liy transpò a.










