Sistèm entegre Delta Robot
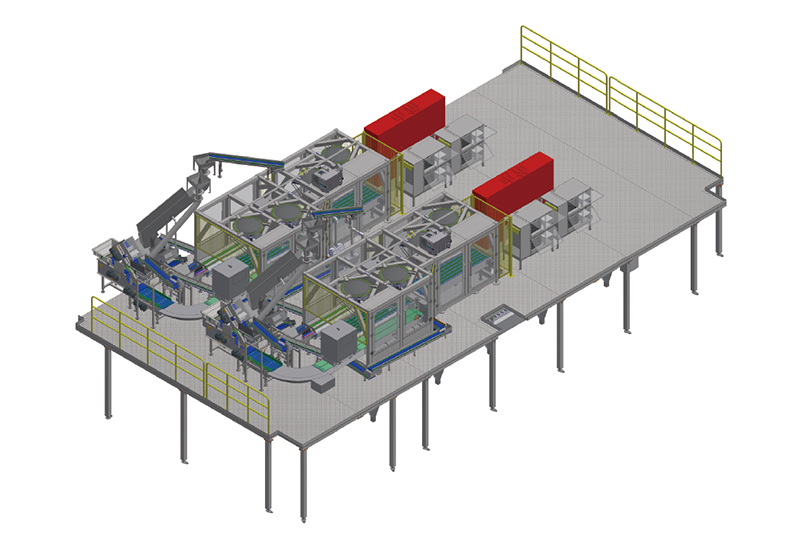
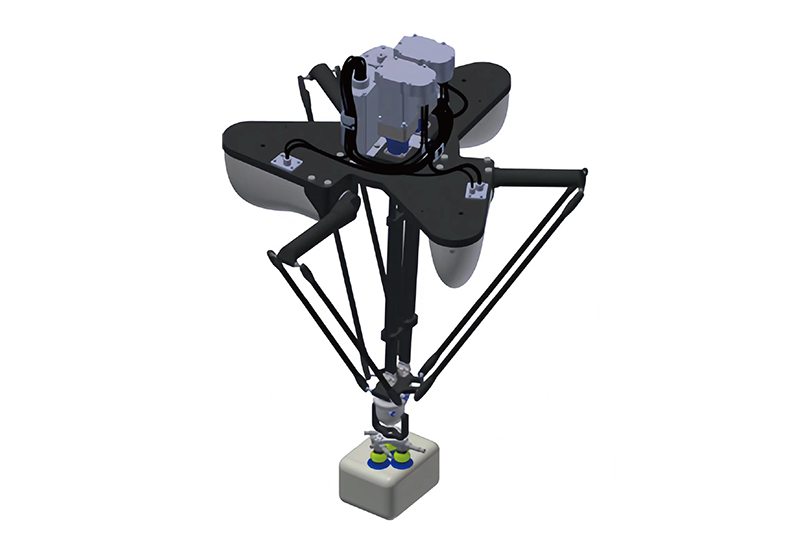
Pwodwi anbalaj enteryè ki pa nan lòd yo soti nan depo a. Apre yo fin klase pa servo debrouyeur a epi sistèm vizyèl la rekonèt pozisyon pwodwi a. Pandan machin anbalaj bwat la ap fonksyone, sistèm vizyèl la ap pataje enfòmasyon an ak robo arenyen an, epi robo arenyen an ap pran epi mete pwodwi yo nan anbalaj ekstèn ki koresponn lan.
Aplikasyon
Apwopriye pou klase, idantifye, epi pran pwodwi anbalaj enteryè ki pa nan lòd sou fòm boutèy, tas, barik, sache, tankou te lèt an poud, vermicelli, nouy enstantane, elatriye, epi mete yo andedan anbalaj ekstèn lan.
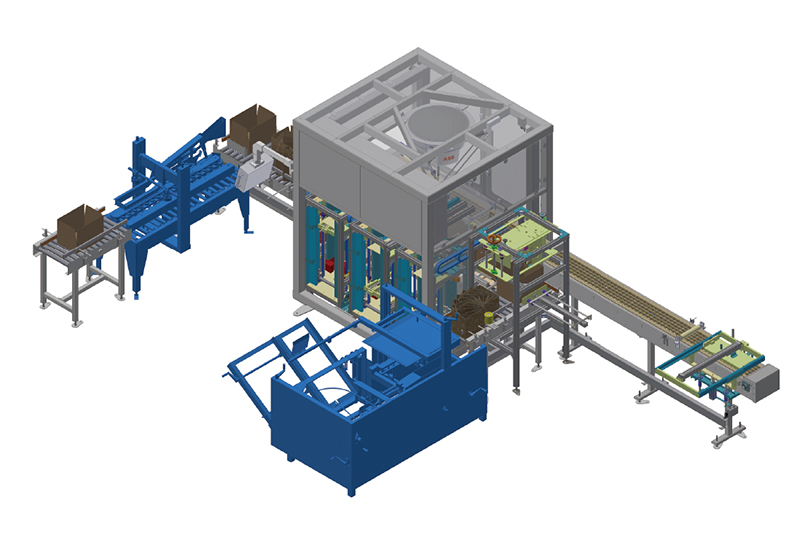
Desen 3D


Liy anbalaj
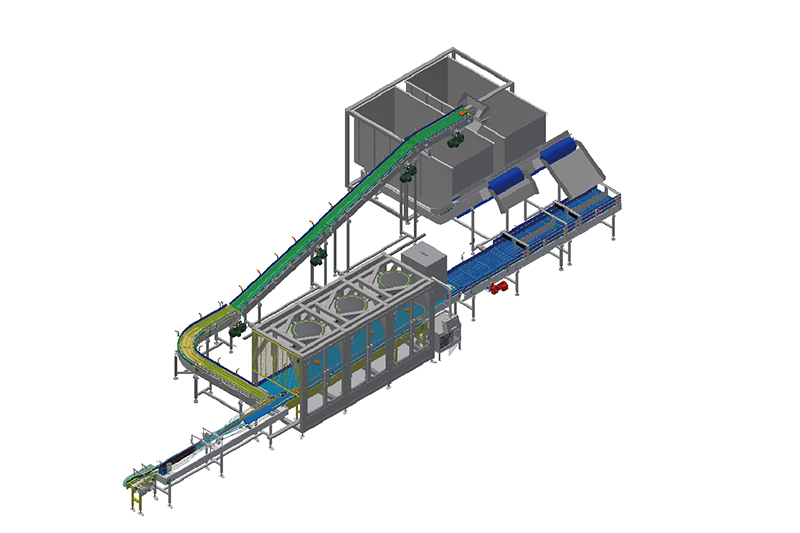
Liy dekodeur

Konfigirasyon elektrik
| PLC | Siemens |
| VFD | Danfoss |
| Motè sèrvo | Elau-Siemens |
| Capteur fotoelektrik | MALAD |
| Konpozan pneumatik | SMC |
| Ekran taktil | Siemens |
| Aparèy ki ba vòltaj | Schneider |
| Tèminal | Phoenix |
| Motè | KOUD |
Paramèt teknik
| Modèl | LI-RUM200 |
| Vitès ki estab | 200 moso/min |
| Alimantasyon pouvwa | 380 AC ±10%, 50HZ, 3PH + N + PE. |
Plis emisyon videyo
- Liy klasman, alimantasyon, debrouyaj ak anbalaj bwat robo Delta






