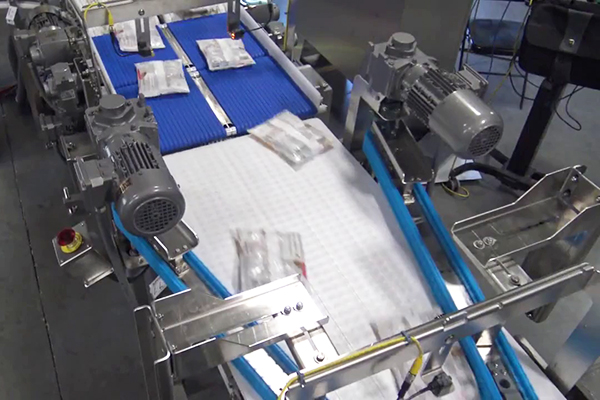
Liy anbalaj bwat Doypack

Liy pwodiksyon otomatik sa a gen ladan l detektè reyon X, rejè sak, aparèy pou plati sak, divizè, transporteur sak, aparèy pou chofe ak refwadisman espiral, machin pou mete etikèt sou sak, aparèy pou monte ka, sistèm anbalaj ka robo ak sistèm palètizasyon robo.
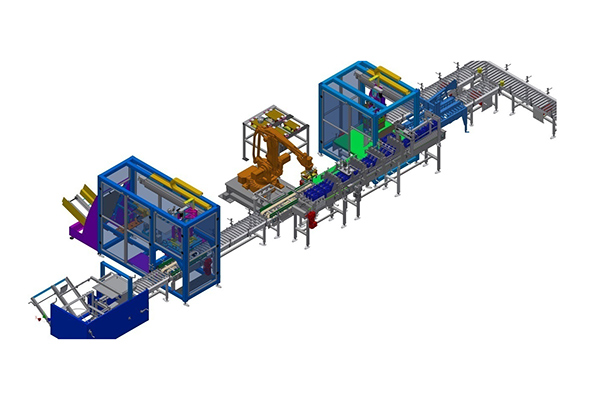
Liy anbalaj manje konplè sa a ekipe ak yon liy transporteur pwodwi entegre, enspeksyon vizyèl, transporteur bwat, anbalaj robotik, mekanis plasman patisyon, estrikti gid anbalaj, elatriye. Machin anbalaj la itilize yon robo men arenyen + yon priz tas vakyòm pou pran pwodwi yo. Transporteur manje pwodwi a ekipe ak yon kamera enspeksyon vizyèl pou detekte pozisyon ak ang pwodwi a sou transporteur a, epi robo a pral swiv epi pran pwodwi a. Epi men arenyen an premye pran pwodwi a epi mete l nan estrikti gid anbalaj la, ki peze yon kouch pwodwi antye nan tout liy lan anvan li chaje l nan bwat la. Aparèy la konpatib ak aparèy plasman tablo patisyon an.
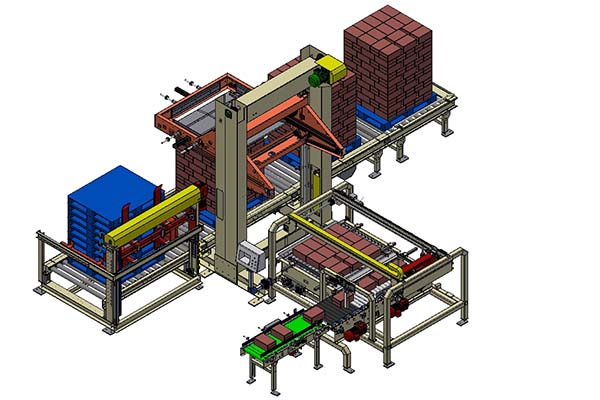
Plan konplè sistèm anbalaj la

Konfigirasyon prensipal la
| Bra robo | ABB/KUKA/Fanuc |
| Motè | SEW/Nòd/ABB |
| Motè sèrvo | Siemens/Panasonic |
| VFD | Danfoss |
| Capteur fotoelektrik | MALAD |
| Ekran taktil | Siemens |
| Aparèy ki ba vòltaj | Schneider |
| Tèminal | Phoenix |
| Pneumatik | FESTO/SMC |
| Disk aspire | PIAB |
| Kote yo pote | KF/NSK |
| Ponp vakyòm | PIAB |
| PLC | Siemens /Schneider |
| IHM | Siemens /Schneider |
| Plak chèn/chèn | Intralox/rexnord/Regina |
Deskripsyon estrikti prensipal la